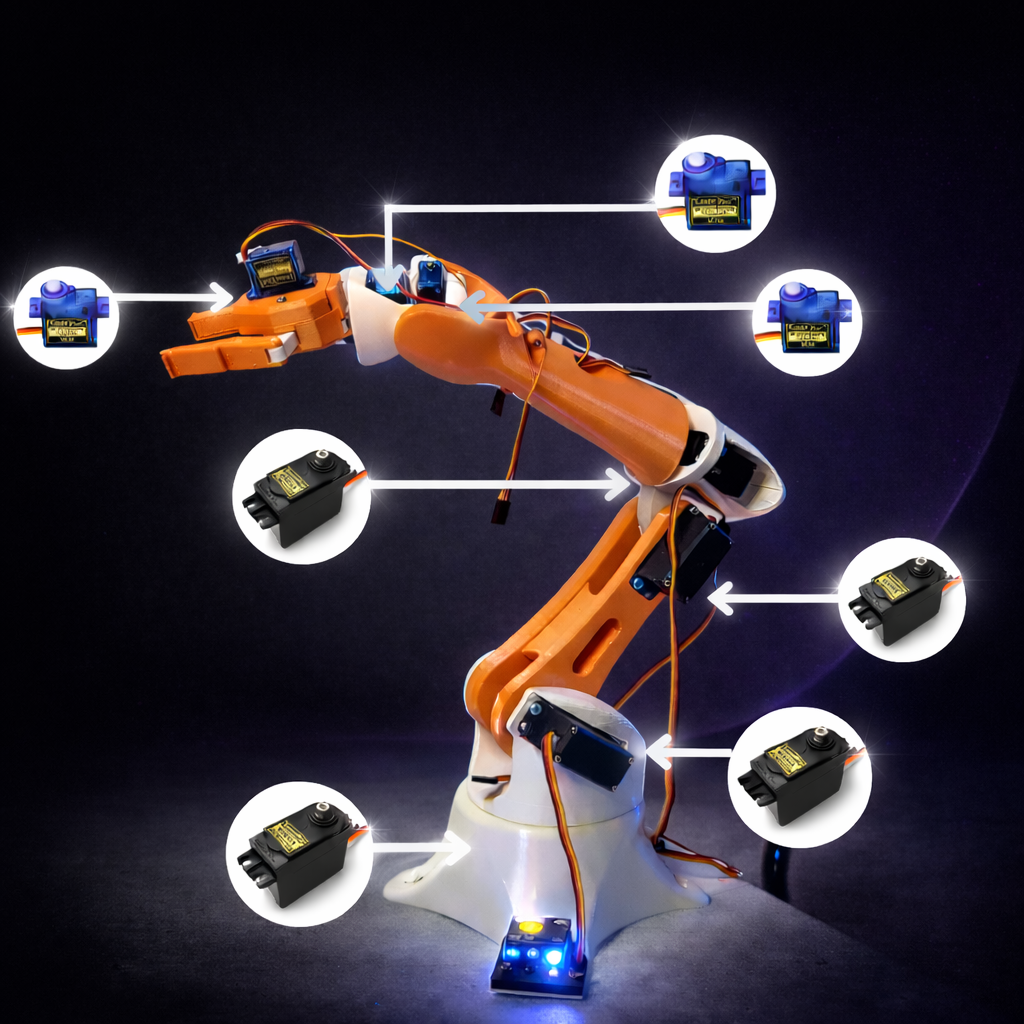
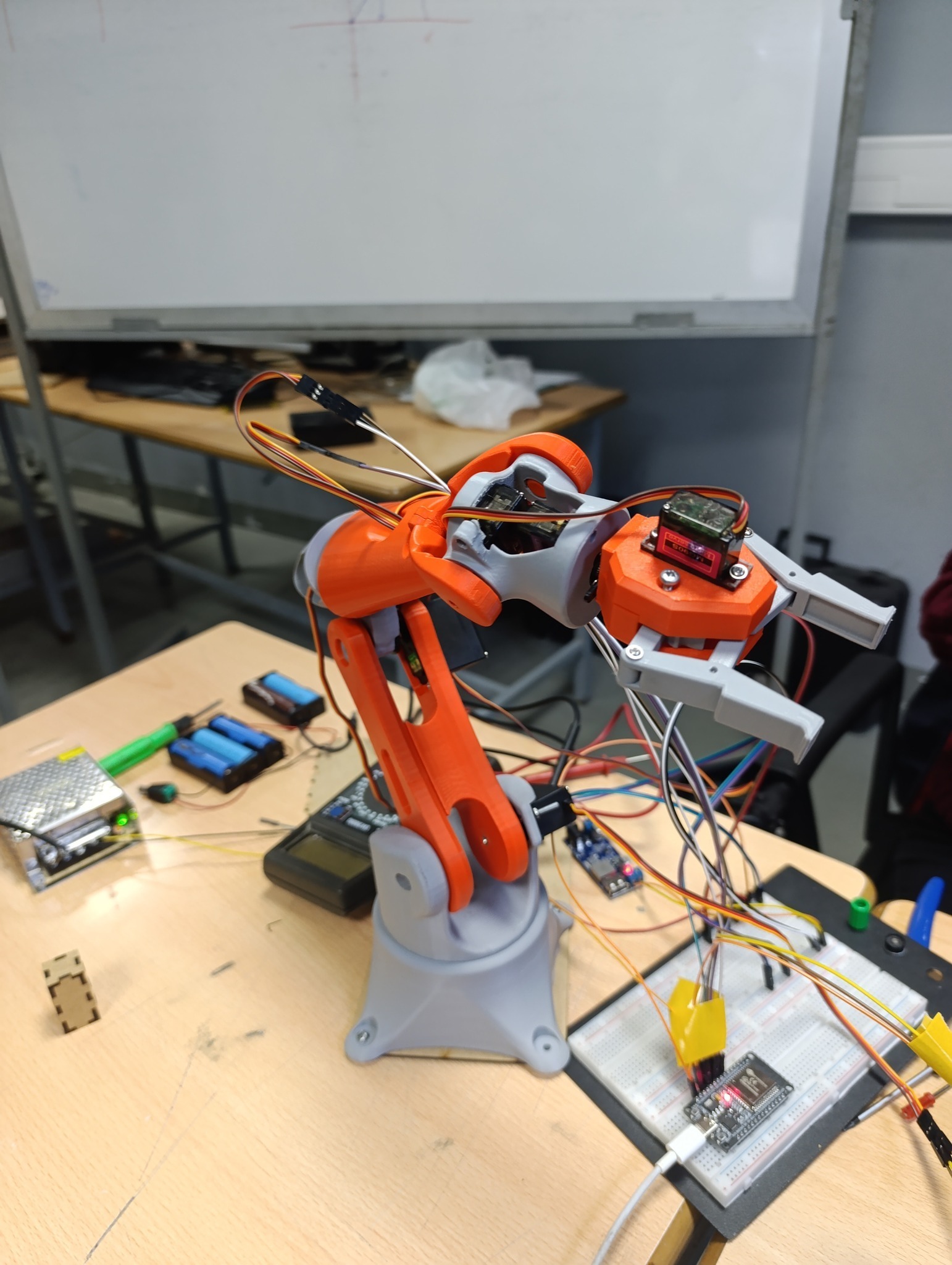
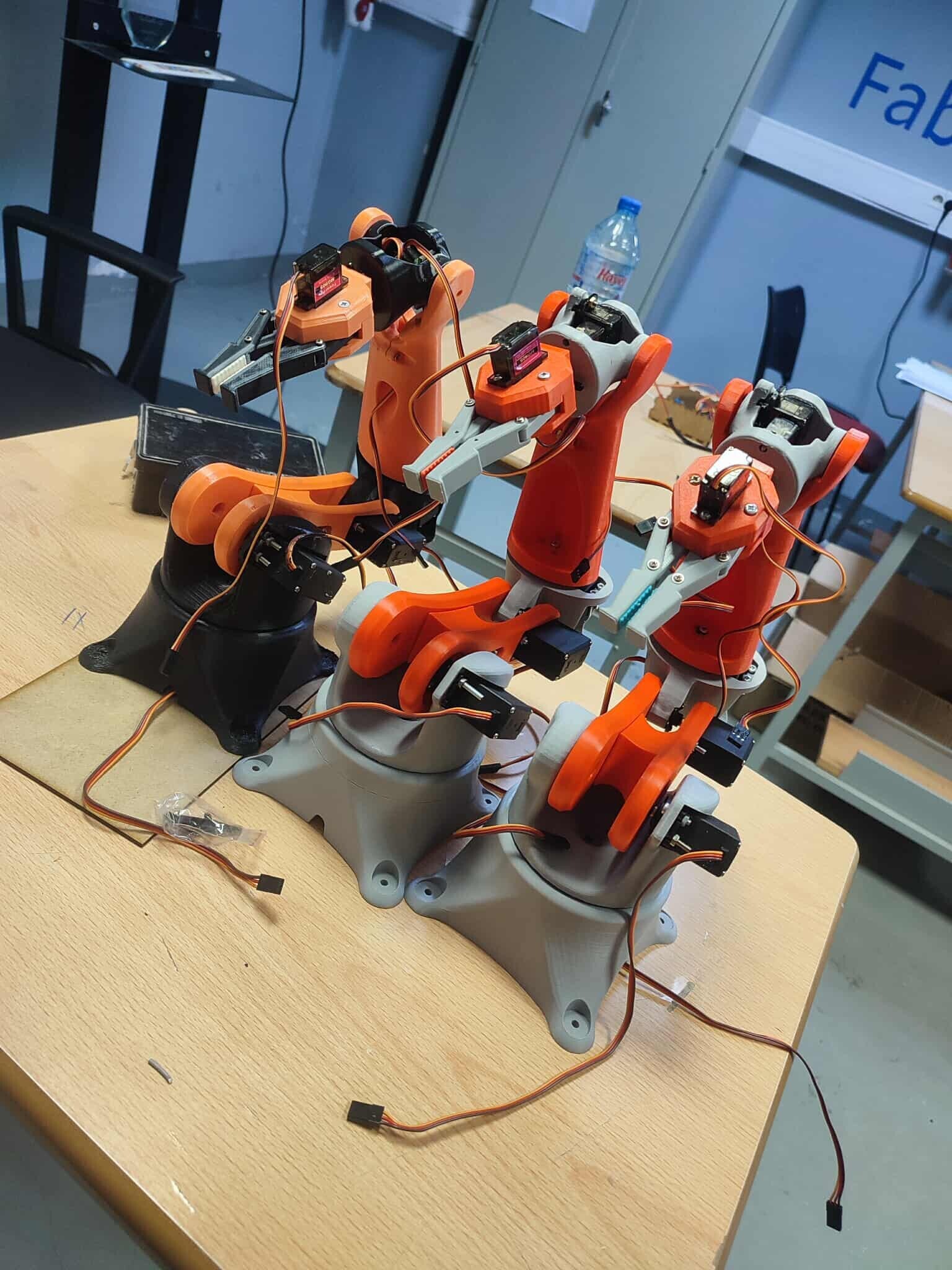
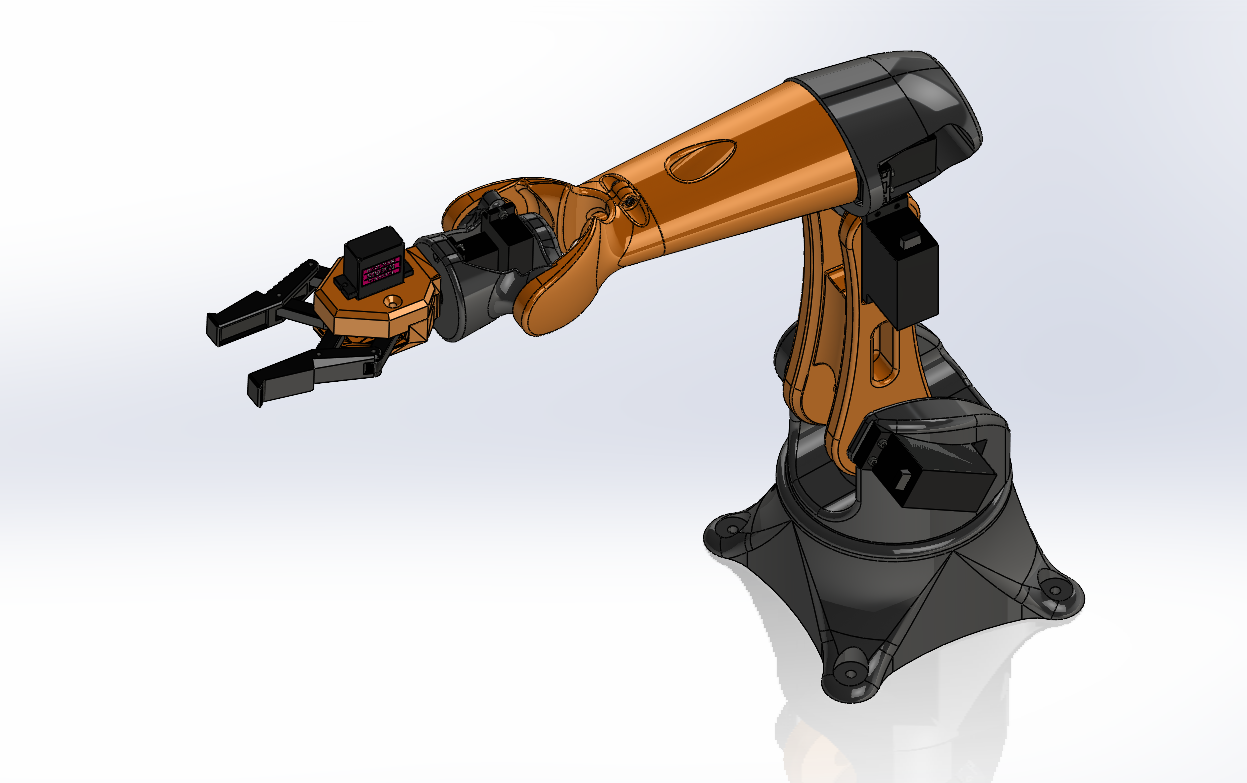
brazo robot arduino 6 ejes
:format(webp)/https://fbi.cults3d.com/uploaders/16759679/illustration-file/bb0247a7-fc14-42fd-bfe4-e3062ca966cb/1000248194.png)
/https://preview3d-images.cults3d.com/bkzkenl7xo9j53bdykf05cabo76d)
/https://preview3d-images.cults3d.com/a3v8pquwkc8jawjr6s4gwphnj89d)
/https://preview3d-images.cults3d.com/u5v5ps38ejz3dp7uvodgv7k1tszd)
/https://preview3d-images.cults3d.com/xixj1s335ttthpweqkslqn74p4ud)
/https://preview3d-images.cults3d.com/2c230gujb1txm830sfzayiqpw31f)
/https://preview3d-images.cults3d.com/4ox6yblnxhexmznlvz1xow6iple7)
/https://preview3d-images.cults3d.com/7jhj8ndx0w48fjtbka26a6lmt0j9)
/https://preview3d-images.cults3d.com/n1qxlakqi7043264f373vi1p1rxi)
/https://preview3d-images.cults3d.com/t3coyj3v2z14et4a8ag80rww9d55)
/https://preview3d-images.cults3d.com/nkkrwhwgnwrlh6p0o8fardz0qqb4)
/https://preview3d-images.cults3d.com/xmm8ym8kfn3o4e8q715svvos68zo)
/https://preview3d-images.cults3d.com/3hmcej5wpa4kndcg5wr8vjybkuep)
/https://preview3d-images.cults3d.com/77uhiznw4amxn0bzrwmvmw4s74qp)
/https://preview3d-images.cults3d.com/ifr7o7e12cybzn60nq7u7dsk0apa)
/https://preview3d-images.cults3d.com/aeftmjnmryyo0ckolmnq7dd6qhbk)
/https://preview3d-images.cults3d.com/1ll4iavubzytpewv47p20gwm1w1o)








/https://preview3d-images.cults3d.com/uetypwy8xko0nnfc1wm81jbpc14j)
/https://preview3d-images.cults3d.com/sjipl0nrozzpc2y4g8t6a952aq4n)
/https://preview3d-images.cults3d.com/v90a2uwc0uy8r3g8u1dic9xuq1n4)
/https://preview3d-images.cults3d.com/4r7j4wwd6kznbgodams3r8cdyyw7)
/https://preview3d-images.cults3d.com/7vrx0uaxdloi950ologztdg7wfs6)
/https://preview3d-images.cults3d.com/variants/4ox6yblnxhexmznlvz1xow6iple7/848ec152657411c3fb217bef17c5a518f412feacc875ce6f22e14239149a46cd)
/https://preview3d-images.cults3d.com/62eqt2ruh8ee3si941llyaeh1lju)
/https://preview3d-images.cults3d.com/gnyus71k8oguvokqlsleuzw2iuyb)
/https://preview3d-images.cults3d.com/umtj5ener5rkyzvtfo41aupodo0h)
/https://preview3d-images.cults3d.com/5zuyskphvw40np98s396sthhjsgn)
/https://preview3d-images.cults3d.com/variants/xmm8ym8kfn3o4e8q715svvos68zo/2c25dfac9c0c4b3fee1a07527bd1c6bb2fb599b319b4e1ae3ef1d256f7781447)
/https://preview3d-images.cults3d.com/variants/3hmcej5wpa4kndcg5wr8vjybkuep/2c25dfac9c0c4b3fee1a07527bd1c6bb2fb599b319b4e1ae3ef1d256f7781447)
/https://preview3d-images.cults3d.com/variants/77uhiznw4amxn0bzrwmvmw4s74qp/2c25dfac9c0c4b3fee1a07527bd1c6bb2fb599b319b4e1ae3ef1d256f7781447)
/https://preview3d-images.cults3d.com/variants/ifr7o7e12cybzn60nq7u7dsk0apa/2c25dfac9c0c4b3fee1a07527bd1c6bb2fb599b319b4e1ae3ef1d256f7781447)
/https://preview3d-images.cults3d.com/variants/aeftmjnmryyo0ckolmnq7dd6qhbk/2c25dfac9c0c4b3fee1a07527bd1c6bb2fb599b319b4e1ae3ef1d256f7781447)
/https://preview3d-images.cults3d.com/variants/1ll4iavubzytpewv47p20gwm1w1o/2c25dfac9c0c4b3fee1a07527bd1c6bb2fb599b319b4e1ae3ef1d256f7781447)
- 8,3k vistas
- 22 me gustas
- 16 descargas
- 0 colecciones
- 3 comentarios
- 0 makes
| Licencia | |
|---|---|
| Usos | |
| Formato de diseño 3D |
17 archivos (STL y ZIP) Cerrar
|
| Última actualización | |
| Fecha de publicación | |
| Número de diseño | 3891709 |
| Autor del diseño | mahdizayet |




¿Te gustaría apoyar Cults?
¿Te gustan Cults y quieres ayudarnos a continuar la aventura de forma independiente? Tenga en cuenta que somos un equipo pequeño de 4 personas, por lo que es muy sencillo apoyarnos para mantener la actividad y crear futuros desarrollos. Aquí hay 3 soluciones accesibles para todos:
- PUBLICIDAD: Deshabilite su bloqueador de anuncios.
- DONACIÓN: Hacer una donación a través de Ko-Fi Hacer una donación
- BOCA A BOCA: Invita a tus amigos a venir, descubre la plataforma y los magníficos archivos 3D compartidos por la comunidad!
Compartir y descargar en Cults3D garantiza que los diseños permanezcan en manos de la comunidad de creadores. Y no en las de los gigantes de la impresión 3D o del software que poseen las plataformas competidoras y que explotan los diseños para sus propios intereses comerciales.
Cults3D es un sitio independiente y autofinanciado que no rinde cuentas a ningún inversor o marca. Casi todos los ingresos del sitio se devuelven a los creadores de la plataforma*. El contenido publicado en el sitio sirve *únicamente a los intereses de sus autores** y no a los de las marcas de impresoras 3D que también desean controlar el mercado del modelismo 3D.